

對這文章發表回應
發表限制: 非會員 可以發表
發表者: 冷日 發表時間: 2008/11/14 8:34:55
貓是一新人,來到這裡卻發現大家都是豹迷,也就只好打腫貓臉沖豹子了。
轎車早已走進了平常百姓的家門了(如此說來我還真的不是一般人物了),在這裡,作為一個新人,總得交份作業吧,偶是學工的,就談談汽車的技術吧,談點什麼呢,引擎?太複雜,而且那東西和材料關係大大,偶是學機械出身,放棄;談懸掛?偶沒開過車,不夠資格,放棄;那就談談各驅動形式的特點吧,我QT**,隨便一搜就一萬多篇,快濫大街了,拉倒吧;還剩啥了?Thinking………,OK就它了!L.S.D(Limited Slip Differential)是一種…………,算了,還是從頭說起吧。
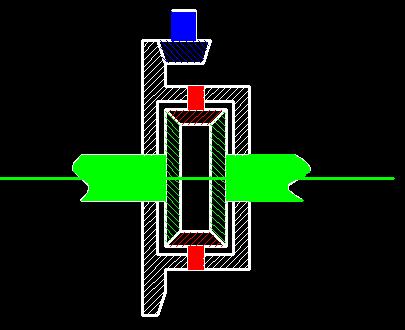
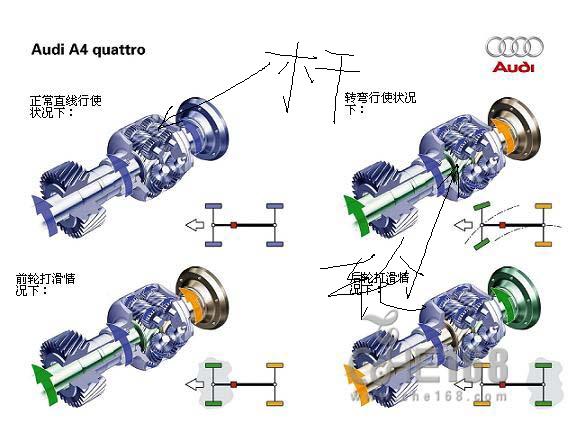
汽車除了直行,還要轉彎。在轉彎過程中,由於車體存在寬度,左右輪的回轉半徑是不一樣大的,也就是說在轉彎過程中,左右輪的轉速是不一樣的,可早期的汽車左右驅動輪為剛性連接,輪胎和機械部件在轉彎過程中存在相當大的損耗,車子的壽命收到嚴重的限制,路易斯‧雷諾通過一個小小的齒輪機構解決了這個問題,(哪國的工程師?法國雷諾公司創始人。)並及其形象的將其命名為「差速器」。這個機構及其巧妙的通過一個行星齒輪組【紅】將左右兩輪的傳動軸【綠】連接起來,變速箱的輸出軸【藍】連接到差速器外殼【白】上,帶動差速器外殼旋轉,差速器內部通過一組行星齒輪(軸固定在外殼上)將動力通過左右半軸傳送給兩側車輪,當汽車直線行駛時,差速器外殼、左右輪軸同步轉動,差速器內部行星齒輪只隨差速器旋轉,沒有自轉。當轉彎時,由於汽車左右驅動輪受力情況發生變化,反饋在左右半軸上,進而破壞行星齒輪原來的力平衡,這時行星齒輪開始旋轉,使彎內側輪轉速減小,彎外側輪轉速增加,重新達到平衡狀態。同時,汽車完成轉彎動作。
正是差速器的出現進一步推動了汽車的廣泛使用,並逐步代替了馬車、火車成為人們日常生活中不可缺少的交通工具。而這種差速器在擁有結構簡單、成本低廉、維護方便的優勢的同時,一個致命的缺點隨著汽車的普及逐漸暴露了出來。
當汽車行駛的路況不理想的情況下,特別是左右兩側驅動輪的附著力不一樣時(比如冰雪、泥坑、沙地等),由於差速器的作用,越是打滑的車輪將會轉的越快,差速器將發動機輸出的扭矩大部分甚至全部傳送到打滑的車輪上,而沒有打滑的車輪卻分不到足夠的扭矩維持車輛行駛,於是,拋錨發生了。這種現象在野外是致命的,於是,差速器鎖誕生了。
所謂差速器鎖就是在一側驅動輪打滑的時候能夠自動或手動的將左右兩側驅動輪剛性連接(也就是將差速器屏蔽掉,差速器此時不再發生作用),兩側車輪就會以相同的轉速旋轉,將發動機的輸出扭矩平分,很好的解決了拋錨的問題。
可是這種差速器鎖僅僅適用於越野車的使用,在野外非鋪裝路面上,路面附著力不大,即便差速器鎖止時車輪發生一些打滑也無所謂,至少沒有安全性問題。可是在鋪裝良好的公路上,輪胎與地面的摩擦是相當大的,在高速轉彎時差速器鎖止是非常危險的,彎道內輪因多餘的旋轉及摩擦,導致輪胎跳離地面連帶利用車軸及懸掛使車體上揚,當內側車體上揚加上離心力的驅動,很自然就會朝轉彎方向的另一側翻覆。
怎麼辦?活人豈能讓尿憋死?!有兩種解決方案:
其一,根據差速器的工作特性,通過ABS(剎車防抱死系統)來解決。在一側驅動輪發生打滑時,電子傳感器收集兩側車輪速度差,當電腦發現轉速差超過設定值時,ABS驅動打滑輪的剎車工作,強制降低打滑輪轉速,以增加另一側驅動輪扭矩(好像ESP就是由此發展而來)。如BMW X5使用的ADB-X系統,Audi Allroad使用的EDS系統,VOLVO使用的AOD系統均屬此類。但這種工作方式是以保證安全性為首要目的,以犧牲速度為代價的,在頻繁的工作狀態下容易失效,可靠性不高。作為越來越重視車輛性能的今天,這種系統在高性能車上是決不能容忍的。於是就有了後者。
其二,L.S.D(Limited Slip Differential限滑差速器)終於出現了。其實本質上來講,第一種也可以稱為電子式限滑差速器,不過平時提到LSD時,絕大多數是指以機械機構實現限滑的差速器,在本文LSD同樣是指後者。
限滑差速器,顧名思義就是指兩側驅動輪轉速差值被允許在一定範圍內,以保證正常的轉彎等行駛性能的類差速器。從傳動零件的組成上也就是從結構上分可以分為兩種:通過螺旋齒輪工作的,和通過離合器工作的。而從其功能上分又可以分為:1WAY、2WAY、1.5WAY三種。
螺旋齒輪結構的LSD是指連接左右輪軸的齒輪齒形為螺旋形,有別於普通差速器的直齒形式。正是因為齒形的變化才使其有了限滑的功能,這類LSD又可分為兩種:扭力感應式LSD和螺旋齒輪LSD。
扭力感應式LSD是將普通差速器的齒輪從齒輪改成渦輪蝸桿,而安裝位置和形式並不變,借由渦輪蝸桿傳動的自鎖功能(渦桿可以向渦輪傳遞扭矩,而蝸輪向渦桿施以扭矩時齒間摩擦力大於所傳遞的扭矩,而無法旋轉)來實現防滑功能。著名的QUATTRO就是採用這種結構,下文會有介紹。

螺旋齒輪LSD同樣是將普通差速器的齒輪從直齒改成螺旋齒,不過不是利用二者摩擦力的不同,而是改變了齒輪的安裝位置和形式,通過只有螺旋齒輪才能實現的安裝位置和形式,利用齒輪的減速比來限制左右驅動輪轉速差的。這種LSD所能達到的最大轉速差比較小,所以只適用於前驅車。

離合器式LSD是指左右兩驅動輪不再通過齒輪連接,而是通過離合片的接合來實現左右驅動輪轉速同步的。這類LSD又可分為兩種:黏性耦合式LSD和機械式LSD。
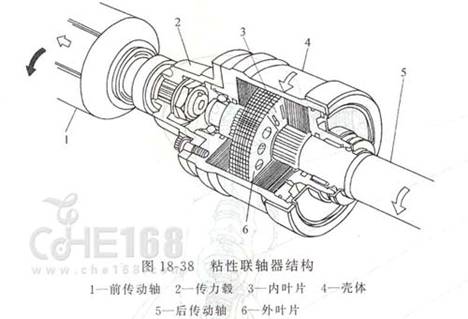
黏性耦合式LSD是指通過液體實現離合器接合的。其內部充滿LSD專用硅油,當左右驅動輪轉速不同(即發生相對轉動)時,硅油就會受熱膨脹,轉速差越大,產生熱量越大,當達到某一界限時,受熱膨脹的硅油就會將離合器壓合,使驅動輪同步,實現鎖止。而離合器的鬆開將不取決於驅動輪是否已經同步,而是取決於硅油的溫度,這種LSD響應速度快,造價低,體積小,應用普及,但並不適合頻繁攻彎的賽車。
機械式LSD是指通過壓板來實現離合器的接合。機械式LSD響應速度快,靈敏度高,限滑比例可根據壓板和離合片的不同組合來實現,可調範圍廣,但造價高,耐久性不好,需定期保養,故僅應用於高性能的跑車中。同時由於其性能出色,也是廠方與民間高性能化改裝的首選結構。

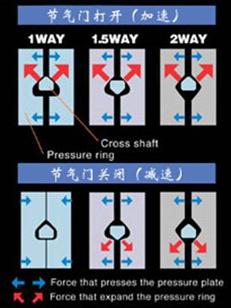
1WAY的LSD是指限滑功能僅在加油時起作用的LSD,比如扭力感應式LSD;2WAY的LSD不僅在加油時起左右,在減速剎車時同樣會發揮性能的LSD,兩種離合器式LSD都有2WAY形式的產品;而1.5WAY的LSD就是在加油時起作用,而在收油時的效果位於1WAY和2WAY之間的一種LSD,比如螺旋齒輪LSD。
還有一種差速器是比較特殊的,叫做中央差速器。將它單列出來不是因為其結構特殊,而是因為其安裝的位置不同。中央差速器僅會出現在四驅車上,其輸入軸安裝在變速箱輸出軸末端,其兩支輸出軸分別接到前軸差速器和後軸差速器上。
是的,你沒有聽錯,四驅車的確有三個差速器,因為它的四隻車輪都是驅動輪,所以前軸和後軸上必須有差速器以調整轉彎時外側車輪和內側車輪的轉速差。而在汽車轉向時,前軸的轉彎半徑與後軸的轉彎半徑也是不同的,如果沒有差速器的話,在彎中加油就會轉向不足,收油就會轉向過度,無法保證安全性。所以必須裝有中央差速器。
而中央差速器同樣存在前輪或後輪全部打滑時有附著力的車軸卻分配不到扭矩的情況,於是中央差速鎖成了越野車的必備武器,而中央差速鎖也和普通差速鎖一樣,在野外是張王牌,而到了公路上就只能算「虎落平原」了。
中央限滑差速器能夠很好的解決這個問題,不過其造價的昂貴直接提高了汽車的製造成本,在競爭越來越激烈的市場中已是不算多見的了。比較常見而且有名的就屬AUDI的QUATTRO和SUBARU的AWD了,它們也是現今市場上最先進的恆時四驅技術。
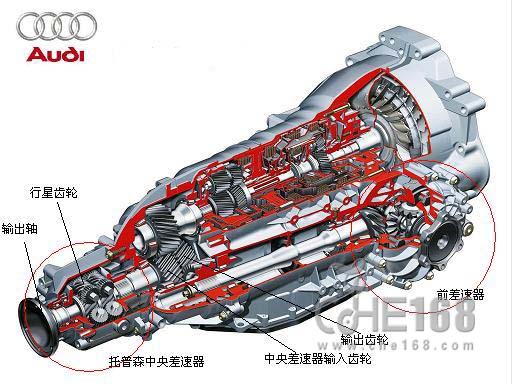
AUDI的QUATTRO系統簡單的說就是由托普森中央差速器(Torsen)和前後軸上安裝的兩個普通差速器構成的恆時四驅系統。托普森中央差速器是一種扭力感應式限滑差速器,而前後軸差速器僅僅是普通的差速器(QUATTRO部門生產的高性能車S、RS系列除外,不作闡述。),其防滑的功能是通過ABS系統來實現的,這種防滑原理前面已經提到,不再贅述。QUATTRO系統最大的特點就是它的體積很小,托普森中央差速器和前軸差速器都已經集成在了變速箱的殼體裡面,有效的節省了發動機倉的空間,是AUDI車能夠允許塞入V8甚至是更加龐大的W12引擎的關鍵。QUATTRO系統安裝在AUDI車上,使AUDI車擁有了更高的性能,雖然它增加了車重,但卻使AUDI擁有更平衡的動態曲線。更主要的就是增加了車輛的主動安全性能,這也是AUDI公司開發QUATTRO系統的最原始的初衷。可以說QUATTRO是以實用和安全為考量的四驅系統,如果說它能給車子提供更高的性能,那只能說這是一個附加功能。
SUBARU的AWD系統展現的卻是另外的一種風格。AWD系統由2WAY黏性耦合式中央差速器(STI生產的車型為2WAY機械式LSD)、前軸普通差速器(STI車型為扭力感應式差速器,這也是為什麼普通型WRX比STI更加容易產生轉向不足的重要原因)和後軸機械式LSD組成。Torsen和黏性耦合兩種中央LSD的區別就是前者通過感應前後輪的扭矩情況決定是否動作,而後者是通過感應前後輪的轉速情況決定是否動作,而二者動作的結果都是調節前後輪的扭矩分配。這樣的構成形式決定了SUBARU在安全的前提下,更加強調高速操控性能。
談到AUDI的QUATTRO,SUBARU的AWD,就不能不談WRC,說到了WRC就必然會出現兩個選手…………


STI之於SUBARU、RALLIAR之於MITSUBISHI就像M-Gmbh之於BMW、AMG之於BENZ,都是車廠旗下的高性能改裝部門,而其作品Impreza WRX STI(以下簡稱STI)與Lancer Evolution(以下簡稱EVO)的關係就彷彿M5與E55的關係一樣,它們是那麼的相近,又是那麼的不同。就二者的性能表現來講,差距僅在伯仲之間,可基本的設計理念卻是大相逕庭。
STI與其原型車WRX的關係就好像M3與3Ser,雖然沒有什麼可以通用的部件,但是卻完全基於相同的結構,只不過進行了加強。輸出為225HP、300NM的EJ205引擎被從內到外的進行了強化,在更換了更強的周邊設備後,達到了280HP、400NM的輸出;代號為GDA的車架經過更換更強的板金件並加裝底盤強化組件後重新命名為GDB,代表了更強的車架剛度,可以承受更強大的G值;傳動系統方面更是將實用的5MT更換為強調性能輸出的6MT,雖有損加速表現但卻擺了過彎時2檔低3檔高的局面;以扭力感應式LSD代替了原來前軸普通差速器,帶來了更加精準的車頭指向;以機械式LSD代替原來的黏性耦合式中央差速器得來的是更加靈活的彎道表現;以鋁制前懸掛組件及倒置避震筒代替了原來的鑄鐵前懸掛和普通避震筒,換來的是更加敏捷的動態響應;整套BREMBO前四後二剎車組合完全不見原廠WRX激走下制動力減弱甚至制動油管爆裂的尷尬。


而EVO之於LANCER卻更像GT-R之於SKYLINE。在LANCER的外殼下,完全的大換血,和EJ207半斤八兩的4G63T,極其堅硬的車架,以及完全不同於LANCER FF的驅動形式。EVO以前軸扭力感應式LSD、主動式中央差速器和主動式後差速器構成AWC四輪驅動系統。如此之換血應該可以像GT-R一樣獨立於LANCER之外單獨建立一個EVO車繫了。

解釋一下主動式限滑差速器。在EVO和STI上主動式限滑差速器都有應用。EVO的主動式差速器名為ACD(中差)和AYC(後差);從05款開始,STI也有了主動式中差,名為DCCD。這三種主動式LSD都是離合片形式,與普通離合器式LSD不同的是離合片是否接合不是靠輸出軸的轉速差反饋到壓板,由壓板施力將離合片接合,而是由電子系統檢測輸出軸的轉速差,反饋給電腦,由電腦決定接合,便輸出信號給電磁或電液系統將離合片接合。工作過程多了電腦的參與,動作更加精確,能夠實現傳統LSD所不能實現的動作。ACD和AYC是靠電液系統,而DCCD是靠電磁系統。
看過網上、雜誌上關於STI和EVO的文章和視頻對比無數,隨便說點自己的想法。
在TOPGEAR(英國BBS電視台名譽全球的汽車節目)對比STI和EVO的錄像中,整個影片中主持人都是在誇獎EVO的ACD和AYC動作系統,原其能在保證車子優秀循跡性的前提下,最大限度的發揮引擎的動力性能,稍嫌簡短的賽道時間對比上,EVO也是以1.1秒的優勢取勝,要知道STI跑完賽道的時間也不過1:30秒,不可謂差距不明顯,就在我以為這次EVO是大贏家的時候,在結尾兩位主持人簡短的對話讓我瞠目結舌。(名字記不住了,暫以A,B代替)
A:它(EVO)太快了,竟然可以和murcielago一樣快。

B:簡直不可思議,它是一輛非常快的車子。
A:也就是說,如果你要在賽道上跑得更快,一定要選EVO8,但是,你會選擇哪一個?
B:翼豹,想都不用想。

怎麼會這樣?!重頭再看,仔細再看。終於,我發現了,他們最大的差別在於彎道,讓我從結構談起。
ACD和AYC的配合是EVO能完勝STI的原因,不過,恐怕這也是讓兩位主持人更傾向於STI的原因。ACD:主動式限滑中央差速系統;AYC:後輪主動式扭力分配系統。二者的實質就是加裝了N多電子傳感器的兩組LSD(限滑差速器),且由同一台電腦控制,也就是二者是同時發生作用的。不同就是ACD裝在前後軸之間,作用是主動調節前後軸扭力分配;AYC裝在後軸,用於主動調節左右後輪的扭力分配。。

以接近輪胎極限的速度下左轉為例,將整個彎角分為兩個部分來看ACD和AYC的動作過程。
首先入彎時,當電腦檢測到車體減速並有轉向動作時:ACD會將扭矩分配傾向於後輪,以抵消EVO較重的車頭引起的轉向不足,AYC又會將較大的扭矩分配給左後輪,以盡量避免在入彎過程中出現的轉向過度,ACD和AYC在及其短的時間內往復循環上述動作,而最終表現在車身上的是EVO在入彎過程中以略為推頭(轉向不足)並逐漸傾向於中性的姿態衝進彎角。(但是,正是由於ACD和AYC的存在,一旦EVO的入彎速度過高,那麼它將帶給你的是推頭,瘋狂的推頭。)
到達彎道頂點後,在加油出彎的過程中AYC又會將較大的扭矩分配給右後輪產生轉向過度來幫助車頭迅速指向出彎的方向,這種後輪扭力分配的方式甚至會讓左後輪離開地面(在各種EVO的錄像中早已屢見不鮮)。

而ACD又會將較大的扭矩分配給前輪以抵消AYC動作所產生的部分轉向過度,而最終表現在車身上的是EVO在出彎過程中以略為甩尾(轉向過度)的姿態和輕微的滑移動作衝出彎角。(看著沒,說著說著就又離地了)

ACD和AYC是由同一個電腦控制的,二者的動作是同時的、迅速的、連續的,卻又起著完全相反的效果,EVO正是在二者不斷的調節與糾正下,以近乎於完美的姿態通過彎角,而駕駛員所需要做的就是穩住方向盤,不斷的提高速度。
同樣的彎角,於STI卻又是另外一番風景,入彎是推頭的,大腳油下去,它就會給你臉色,甩給你看,出彎竟然也是推頭的,電影裡最後一個左彎呼的一下,STI就衝進了草地。

無可否認,EVO的四驅系統是先進的,是非常先進的,以至於它的對手都要向它學習,05款STI也開始在AWD系統中加裝了DCCD,其實就是SUBARU版本的ACD系統,只不過DCCD不是象ACD那樣是全時的,是和AYC一樣有開關的,而且可以固定於65:35~35:65間的任意一個值上。
有人要說「看來EVO真的是比STI強啊,技術先進,速度更快,TOPGEAR這黑哨是不是吹的有點太明顯了啊!」且慢,人家沒說EVO不好啊,人家TOPGEAR有說EVO快啊,而且是不可思議的快。但是,我很清楚的知道,我是driver,並不是racer,我需要的是溝通,人和車之間的溝通、交流,建立在這些基礎上的速度我叫它駕駛樂趣,而不是EVO那種簡單的快,程式化的快。
一輛優秀的運動型轎車,速度僅僅是它的一方面,當然也是必要的,慢得和公交車似的就不叫運動型轎車了。更重要的是操控性要好。什麼樣的算好?首先要能夠忠實的執行駕駛者的每一個命令,當然是要在車子的能力範圍內了,而這個能力的界限應該是模糊的,也就是從受控到失控一定要有一個漸進的過程,不應該太神經質了,我們需要的是轎車不是賽車;其次它應該能夠和駕駛員進行良好的溝通,把有用的信息反饋回來,把沒有用的淘汰掉,通過良好的反饋讓人和車統一在一起。
在駕駛的感覺上,STI和EVO就像下面這樣:
Driver—→方向盤、踏板—→STI—→傲人的性能
↑↓
——方向盤、座椅、踏板←—
Driver—→方向盤、踏板————————→EVO——→傲人的性能
↑ ↑ ↓
——方向盤、座椅、踏板←—ACD、AYC←——
EVO相較於STI多了ACD和AYC電子系統,這無疑是先進的,但在先進技術應用的同時,最原始的應該由駕駛員來決定的事情,好大一部分都被AYC代替了。正所謂魚和熊掌不可兼得,要想以不是非常NB的技術在彎中獲得絕對優化的路線和狀態,那EVO的確是不二之選,但必然要損失掉很多原始的駕駛感受;如果你更看重和愛車的溝通,而並不在乎在某個彎角比人家慢個幾分之一秒的化,STI將會是你忠誠的夥伴。

EVO和STI都是這一等級的運動轎車的顛峰之作,非要在二者間得出個誰是誰非的結論的話,是沒有意義的,只能說你喜歡誰的風格。問我選哪個?那好,我會告訴你:
翼豹,豹子的一種,屬貓科動物,系偶表親,絕無胳膊肘往外拐之理。
偶選

不對不對,全TM亂了。重來
偶選

本文於2005-12-27 22:29:01.381被 老貓 修改過。這是本帖的第5次修改。
此帖出自: 貓眼看車 - Subaru論壇_車友會俱樂部_太平洋汽車論壇